Performance Co-Pilot Protocol (PCP)
Performance Co-Pilot provides a framework and services to support system-level performance monitoring and management. For live monitoring, PCP uses a TCP based protocol for transferring information about performance metrics between collector and monitor processes.
History
PCP was originally developed at Silicon Graphics Inc (SGI) in the late 90s. It is now an open source project with contributors around the globe.
Protocol dependencies
Example traffic
{kind=link}
{kind=link}
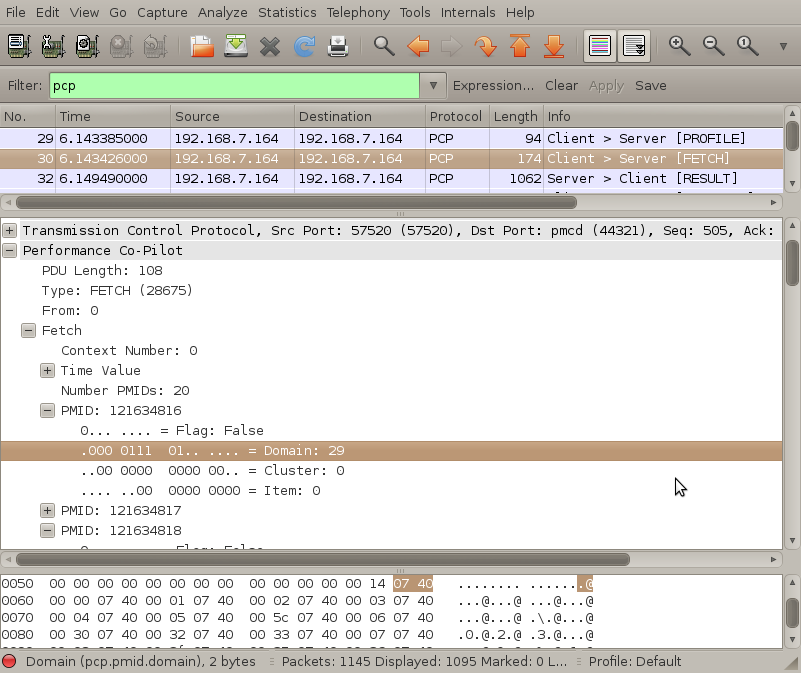
Wireshark
The PCP dissector is fully functional.
Example capture file
-
PCP/pcp_ssl_creds.pcap - Example of SSL upgrade via SECURE_ACK
-
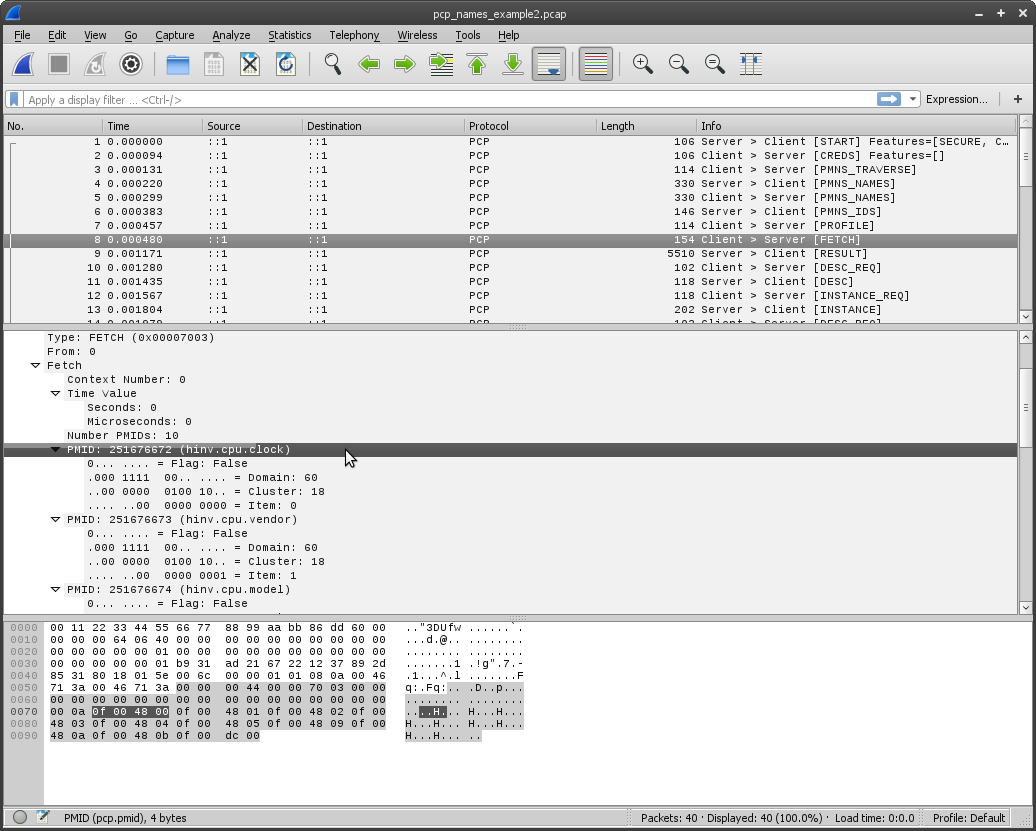
PCP/pcp_names_example.pcap - Example of dynamic PMID resolution
Links
-
PMPROXY - Proxy protocol for PCP.
-
PCP Project Page - Home page for the Performance Co-Pilot project.
Imported from https://wiki.wireshark.org/PCP on 2020-08-11 23:17:50 UTC